You will find a mirror of most of the code repositories for those paper on my forge.
Pre-prints
| Featured image | Title |
|---|---|
 | Vsevolod Skorokhodov, Chenghao Xu, Shuo Sun, Olga Fink, Malcolm Mielle (2026) SEAR: Simple and Efficient Adaptation of Visual Geometric Transformers for RGB+Thermal 3D Reconstruction arxiv pre-print PDF, Code, Dataset |
 | Shuo Sun, Unal Artan, Malcolm Mielle, Achim J Lilienthaland, Martin Magnusson (2026) Dense Dynamic Scene Reconstruction and Camera Pose Estimation from Multi-View Videos arxiv pre-print PDF, Code |
 | Ali Waseem, Malcolm Mielle (2025) Physics-Informed Neural Networks for Thermophysical Property Retrieval arxiv pre-print |
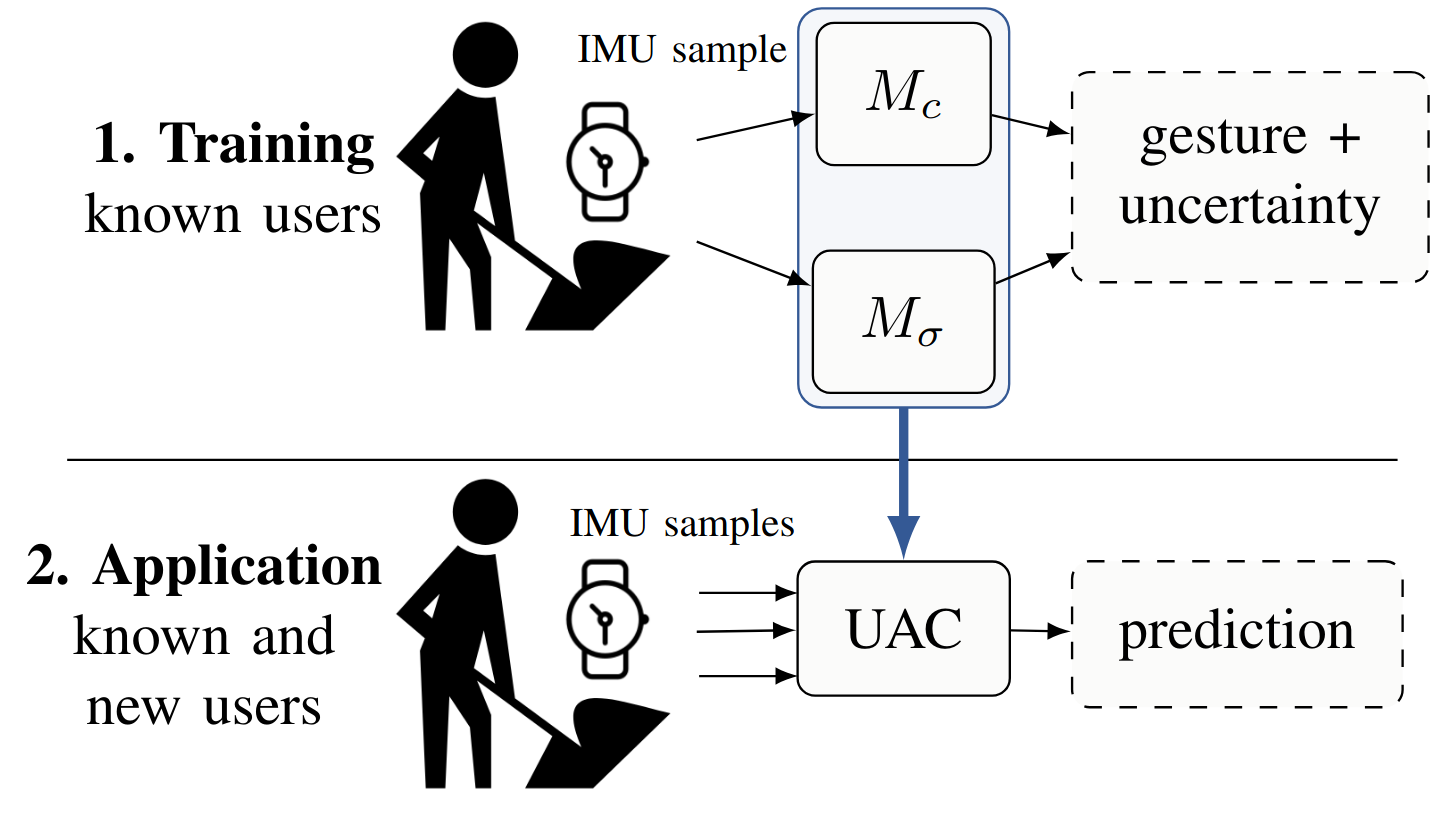 | Farida Al Haddad, Yuxin Wang, Malcolm Mielle UAC: Uncertainty-Aware Calibration of Neural Networks for Gesture Detection arxiv pre-print |
Publications
| Featured image | Title |
|---|---|
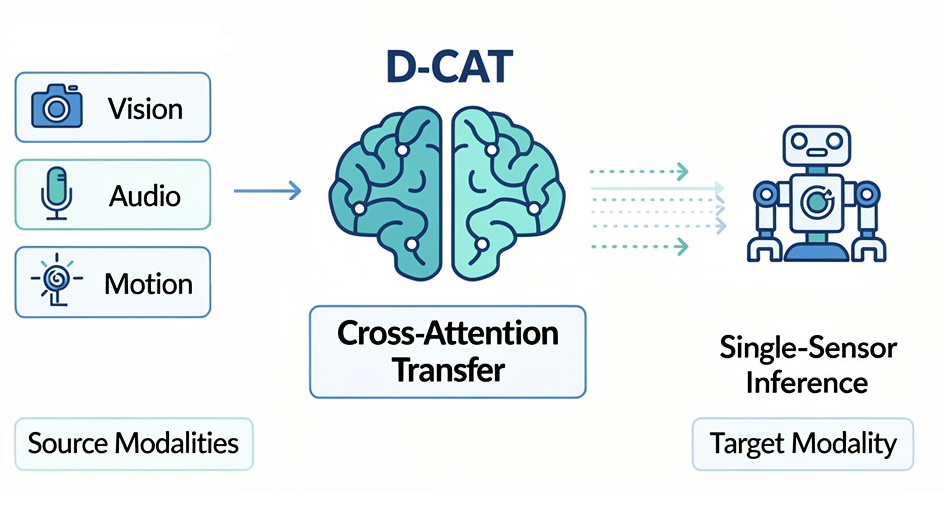 | Leen Daher, Zhaobo Wang, Malcolm Mielle (2026). D-CAT 😼 - Decoupled Cross-Attention Knowledge Transfer between Sensor Modalities for Unimodal Inference 2026 IEEE International Conference on Robotics & Automation (ICRA) PDF, Code , URL |
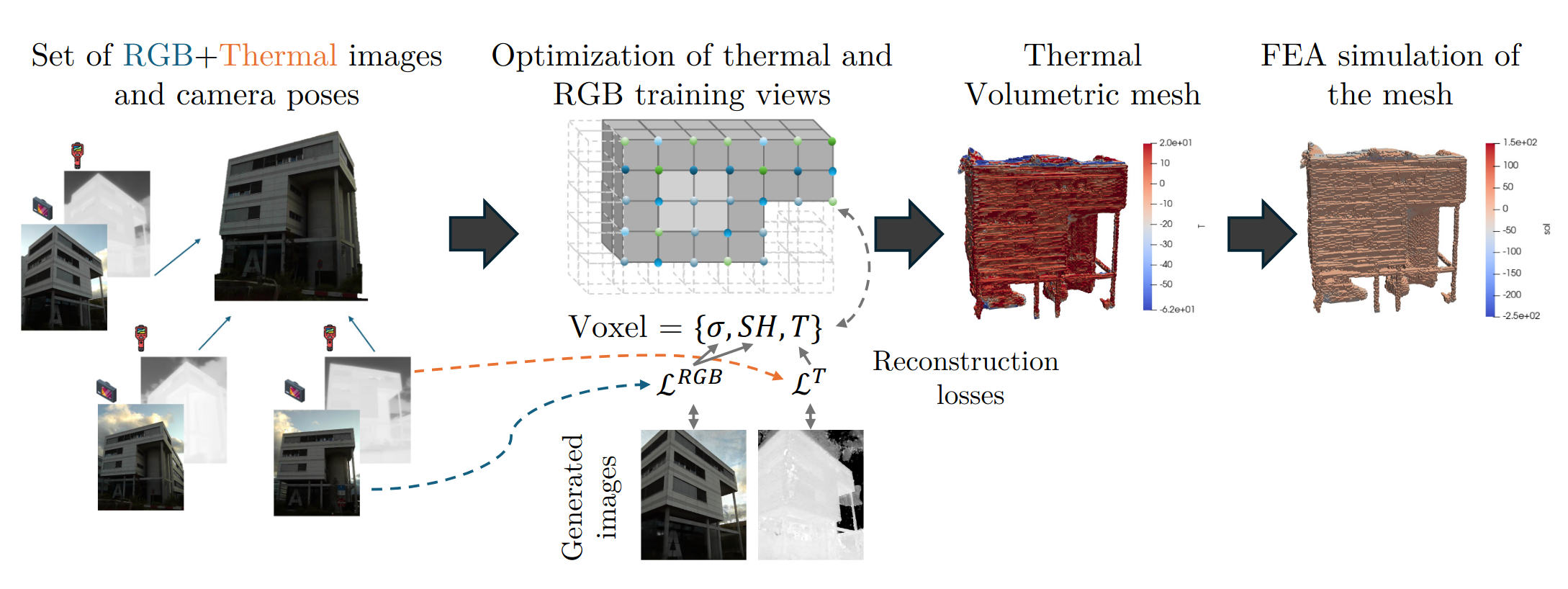 | Etienne Chassaing, Florent Forest, Olga Fink, Malcolm Mielle (2025). Thermoxels: a voxel-based method to generate simulation-ready 3D thermal models Journal of Physics: Conference Series (CISBAT 2025) PDF, Code, Project cite |
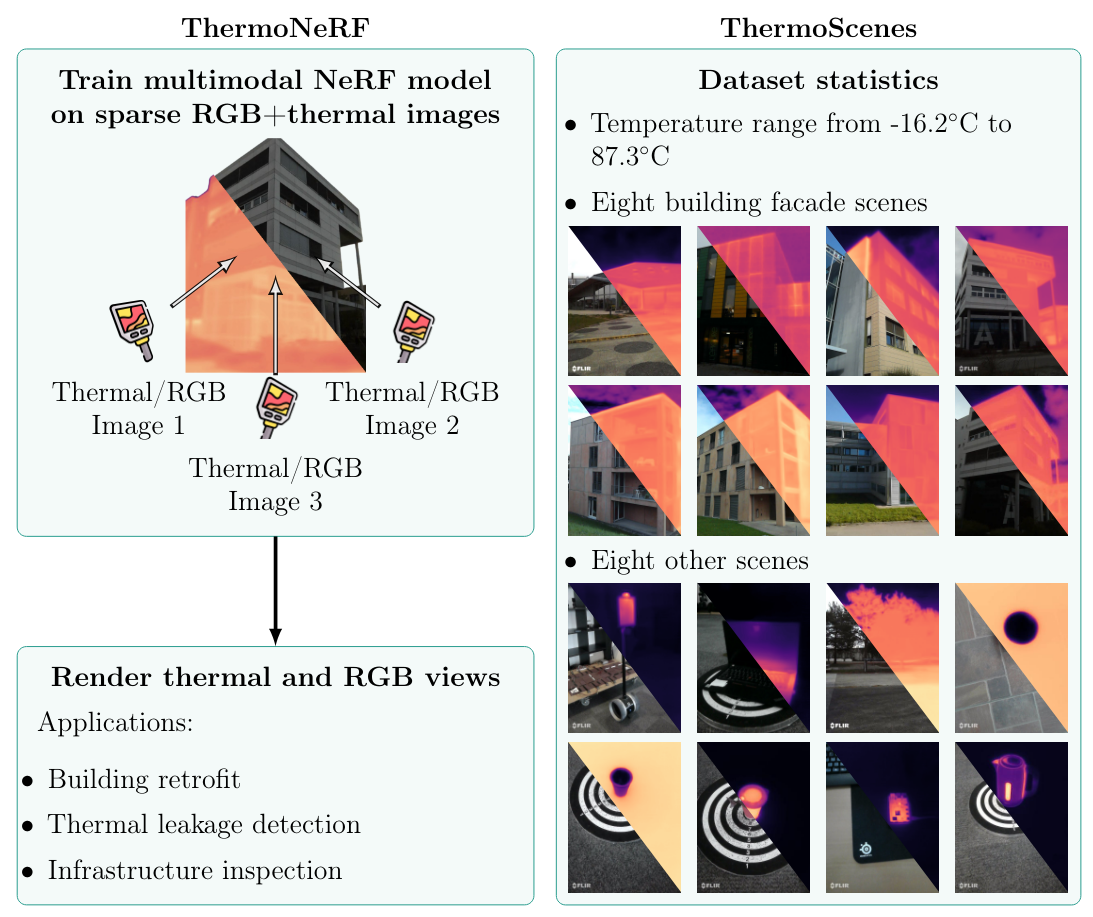 | Mariam Hassan, Florent Forest, Olga Fink, Malcolm Mielle (2025). ThermoNeRF: A Multimodal Neural Radiance Field for Joint RGB-Thermal Novel View Synthesis of Building Facades. Advanced Engineering Informatics DOI, Code, Dataset, Project, arXiv cite |
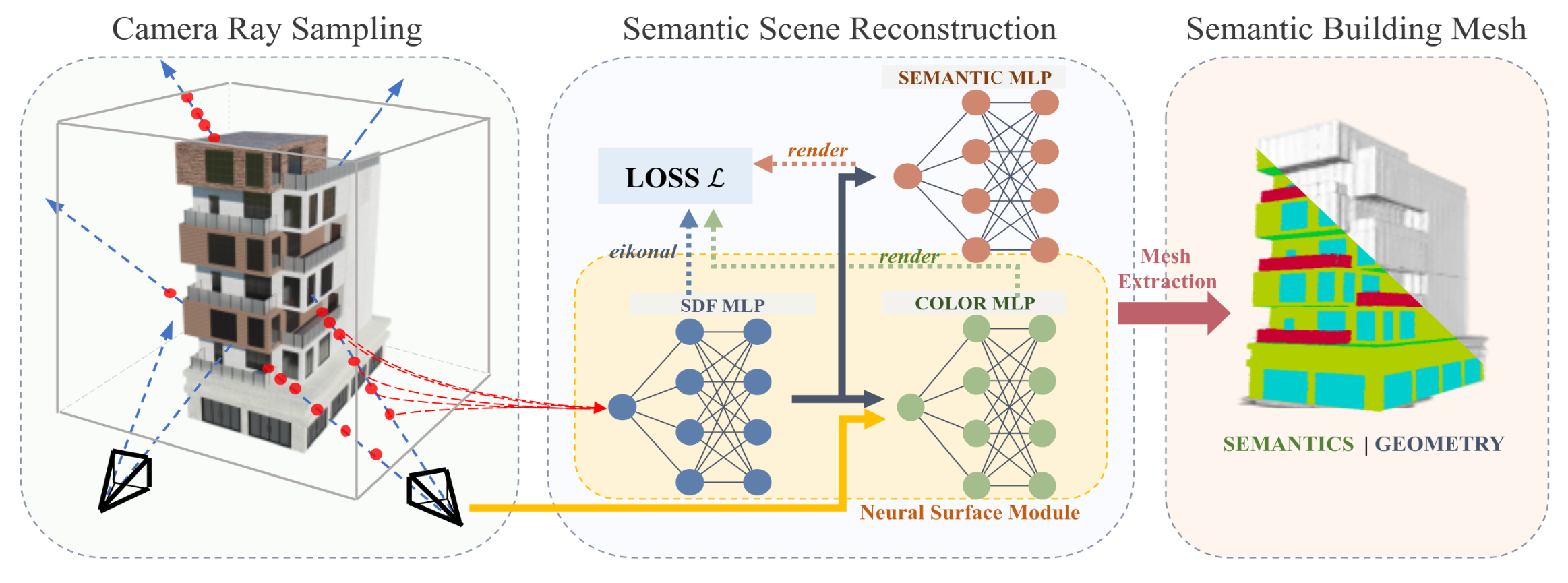 | Chenghao Xu, Malcolm Mielle, Antoine Laborde, Ali Waseem, Florent Forest, Olga Fink (2025). Exploiting Semantic Scene Reconstruction for Estimating Building Envelope Characteristics Building and Environment DOI, PDF, Dataset cite |
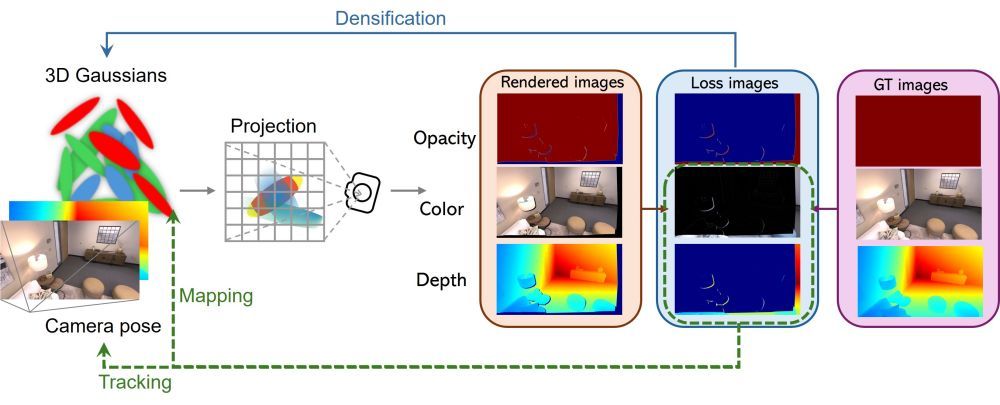 | Shuo Sun, Malcolm Mielle, Achim J. Lilienthal, Martin Magnusson (2024). High-Fidelity SLAM Using Gaussian Splatting with Rendering-Guided Densification and Regularized Optimization. 2024 IEEE International Conference on Intelligent Robots and Systems (IROS). DOI, PDF |
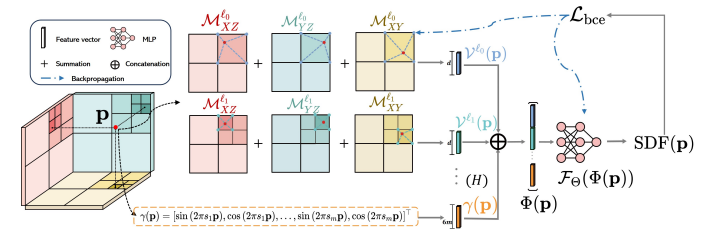 | Shuo Sun, Malcolm Mielle, Achim J. Lilienthal, Martin Magnusson (2024). 3QFP: Efficient neural implicit surface reconstruction using Tri-Quadtrees and Fourier feature Positional encoding. 2024 IEEE International Conference on Robotics and Automation (ICRA). DOI, PDF, Code |
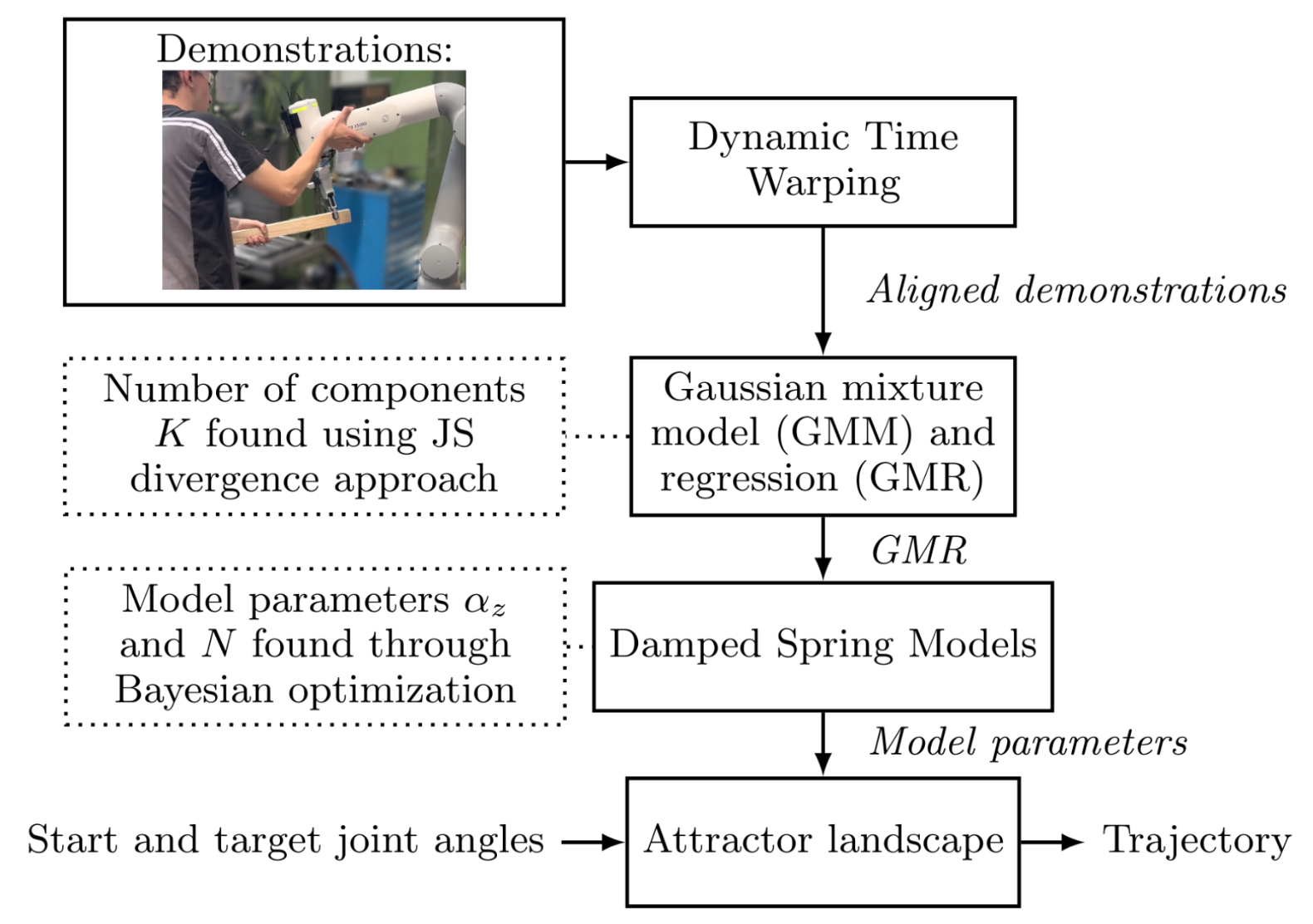 | Lorenzo Panchetti, Jianhao Zheng, Mohamed Bouri, Malcolm Mielle (2023). TEAM: A Parameter-Free Algorithm to Teach Collaborative Robots Motions from User Demonstrations. Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics. DOI, PDF, CodeDOI |
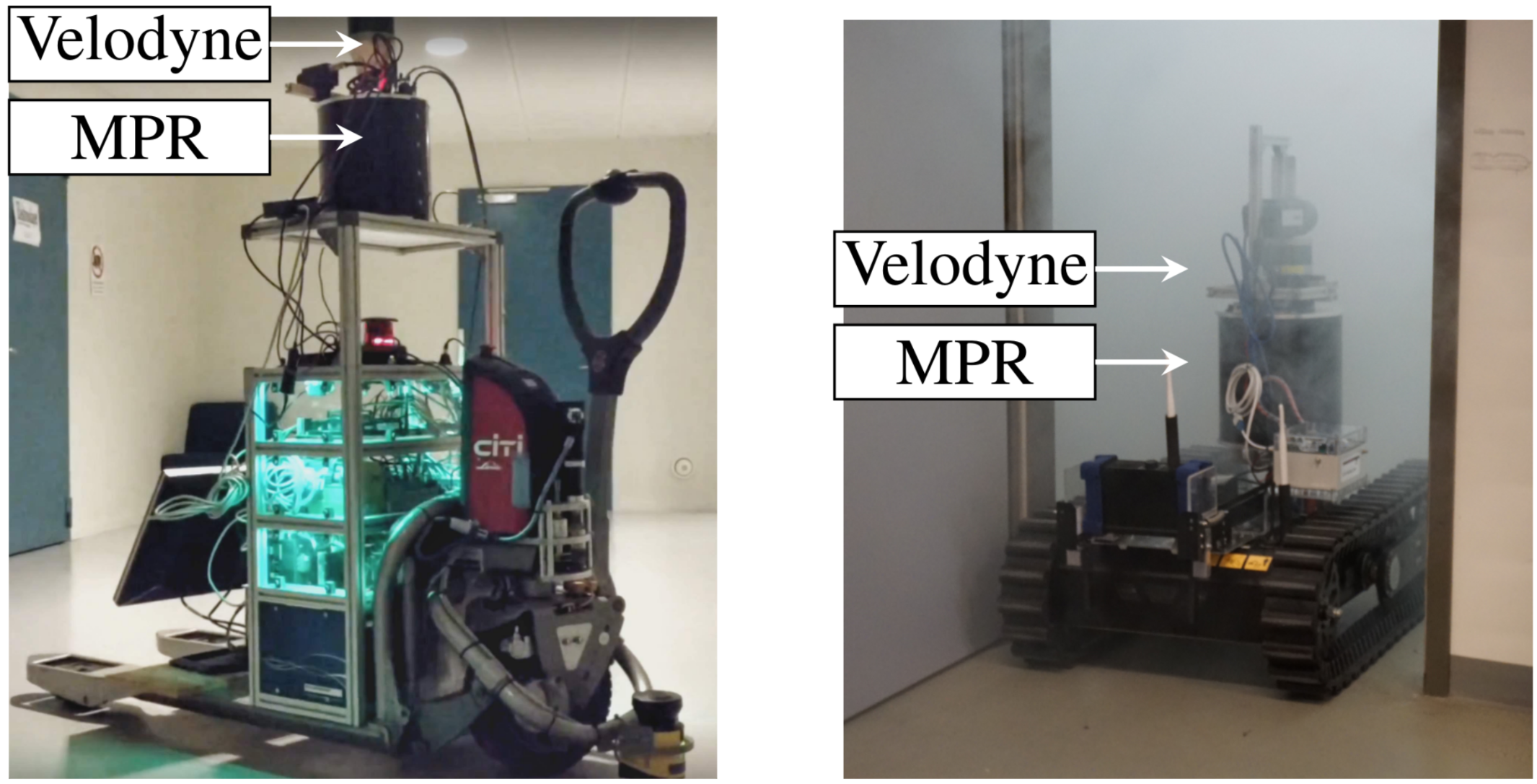 | Malcolm Mielle, Martin Magnusson, Achim J. Lilienthal (2019). A comparative analysis of radar and lidar sensing for localization and mapping. 2019 European Conference on Mobile Robots (ECMR). DOI URL |
| Malcolm Mielle, Martin Magnusson, Achim Lilienthal (2019). URSIM: Unique Regions for Sketch Map Interpretation and Matching. Robotics DOI URL | |
| Malcolm Mielle, Martin Magnusson, Achim J. Lilienthal (2019). The Auto-Complete Graph: Merging and Mutual Correction of Sensor and Prior Maps for SLAM. Robotics DOI URL | |
| Malcolm Mielle, Martin Magnusson, Achim J. Lilienthal (2018). A Method to Segment Maps from Different Modalities Using Free Space Layout MAORIS: Map of Ripples Segmentation. 2018 IEEE International Conference on Robotics and Automation (ICRA). DOI URL | |
| Malcolm Mielle, Martin Magnusson, Henrik Andreasson, Achim J. Lilienthal (2017). SLAM auto-complete: Completing a robot map using an emergency map. 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR). DOI URL | |
| Malcolm Mielle, Martin Magnusson, Achim J. Lilienthal (2016). Using sketch-maps for robot navigation: Interpretation and matching. 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). DOI URL |